指南:園田浩二(イーフロンティア)
 |
●ロボットの構成パーツとこれまで作成したパーツの変形
さて、いよいよ組み立てです。掲載した分解図を見ていただければわかりますが、このロボットは、色分けしたとおり青、赤、黄色、緑色の種類だけしかないのがおわかりいただけると思います。
 |
| 色分けした部分が基本的に同じパーツです |
まず、各部品を編集しながらロボットの大体の形を作ってしまいましょう。
今まで作成したパーツは全部水平、垂直の状態で作っていますが、斜めの状態ではジョイントの組み込みも、形状の加工も面倒になりますので、全身を直立のまま組み立てます。
 |
全体のプロポーションが直立のままだと、つまらなく見えてしまうかも知れませんが、
ジョイントを組み込んだ後で自由にポーズがつけられるようになりますので、それまでもう少しだけ我慢してください。ポーズを付けると一気にロボットらしくなります。
・青い形状は、最初に説明した手足用のパーツを、形状編集モードで変形したバリエーションです。第3回で紹介した各コントロールポイントを複数選択して、編集する方法等をもう一度思い出してみてください。また、オブジェクトモードのままマニピュレータを使って拡大縮小等を使っても構いません。それぞれの位置に合うように変形して編集したパーツは、コピーや直線移動を使って実際の位置に複製配置しながら作っていきます。
・赤い形状は胸の形状が原形です。これも同様に、パーツをコピーしてそれぞれの部分に合うように形状を編集しています。肩や腹部の形状は、胸のパーツの二段に突き出た部分の一番外側の輪郭の線形状2本を消去して、大きさを調整しています。
・黄色の頭部の形状は、胸部の作り方を応用して作成しました。他にも手の部分が黄色になっていますが、掃引体とジョイントだけでできていますので、ジョイントの組み込み方を憶えてしまえば、簡単に作れると思います。
・緑のパーツは、全て「回転体」で作成しています。このパーツがなくてもジョイントで関節は曲がりますが、関節らしく見せるための形状です。実は掃引体と同じく、回転体はShadeの中では一番作り方が簡単な方法なので、説明を後回しにしました。各手足の二重関節部には回転体で作ったシリンダー状の形状が2個ずつ入った二重関節になっています。この工程は、ジョイントを組み込みながら説明していきます。
 |
| 関節部分はジョイントを2つ使った二重関節構造になっています |
また、今回の講座では、それほど凝った形状を作る工程は紹介していませんが、完成図を見ると、腕部、脚部それぞれにジョイント部分がはまる凹みがあるのがわかると思います。これは「ブーリアンレンダリング」という手法で簡単に作れます。これも組み立てながら説明します。
 |
| 関節部分をちょっと分解してみました。腕部分に丸い凹みがあるのがわかります。これをブーリアンレンダリングで作成します |
●回転体の作成
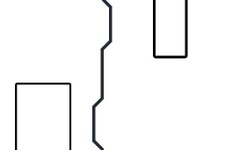
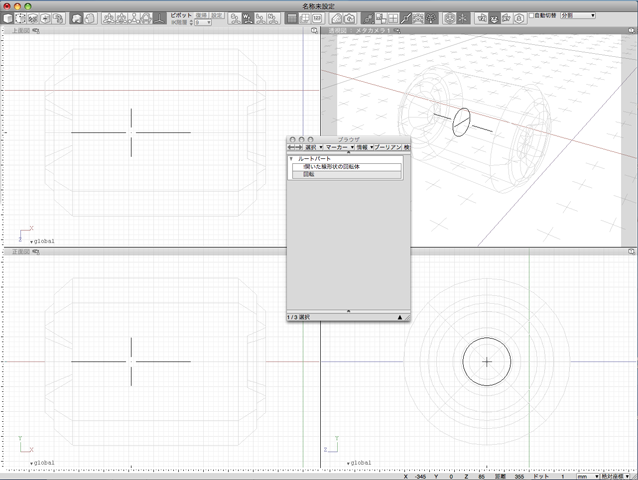
二重関節のシリンダー部分を回転体で作成していきましょう。回転体の作り方は簡単です。回転体の断面となる形状を「開いた線形状」か、または「閉じた線形状」で描いて、「ツールボックス」で「回転体」を選択し、回転体の軸となる線を引くだけです。今回のシリンダーは中央部に穴がありませんので、「開いた線形状」で断面を描いてください。ただし、回転の軸を90度間違えるとただの円盤形状になってしまいますし、軸が断面を離れると予想したものとは違うドーナツ形になってしまうので注意してください。
こうした失敗をしないためには、断面図形を描いたら、一切図形ウインドウを触らず、「ツールボックス」の「solid」で「回転体」を選択し、断面を描いたのと同じ画面で回転軸をマウスでドラッグしてください。回転体が作成されると同時に「開いた線形状の回転体」とブラウザに表示されます。これだけでシリンダーの部分は完成です。
 | 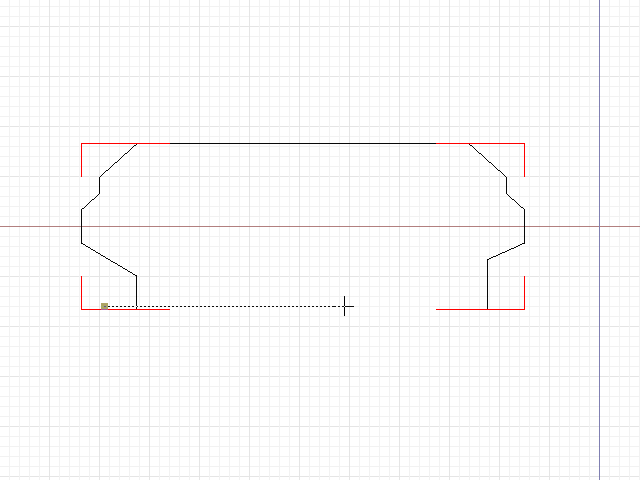 |
| 回転した後の形を想像しながら、「開いた線形状」で断面形状を描きます | 「ツールボックス」の「solid」で「回転体」を選択し、回転の軸となる線をマウスをドラッグして描きます。この回転軸は点線で描かれます |
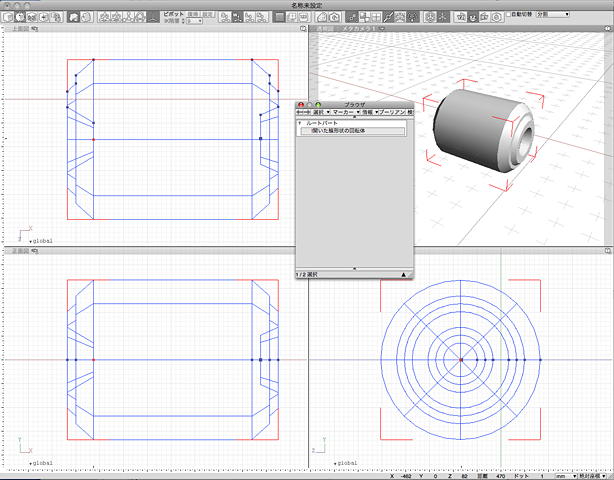 |
| マウスのボタンを離すと回転体が作成されます。断面を描いたウインドウと同じウインドウに回転軸を描くのがおかしな回転体を作らないポイントです |
●ジョイントを作成
次に作成したシリンダー形状を動かすためのジョイントを作成します。Shadeでは、実体としての形状とは無関係に、ジョイントのみをオブジェクトとして作成できます。形状から離れた所にジョイントを作ったり、ジョイント同士を組み合せて複雑な動作をさせたりする事がブラウザの階層構造で構築できます。今回は肘の間接部分を例にとって、特定方向にだけ回転するように回転ジョイントを作成します。(動作の種類に応じて三軸に自由に回るボールジョイントや直線移動ジョイント等、様々な種類のジョイントがあります。各々の設定の方法はほぼ以下と同じです。)
まず、「ツールボックス」の「part」ツールから「回転」を選んで、先程の回転体で描いた回転軸と同じ所をマウスでドラッグすると回転体の軸が描画され、「ブラウザ」ウインドウに「回転」が作成されます。次に「ブラウザ」内で「開いた線形状の回転体」をドラッグして「回転」パートの上に乗せると「開いた線形状の回転体」が「回転」パートの中に内包されます。
 |
| 回転の軸をジョイント形状の中に描きます。右面図でセンターが正しく揃うようにしてください |
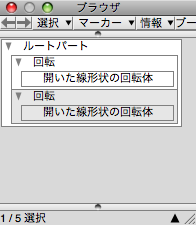 |
| 「ブラウザ」で「開いた線形状の回転体」を「回転」の上にドラッグして移動すると、回転の下に「開いた線形状の回転体」が配置されます |
次に、「ブラウザ」で回転パートを選んだ状態で、「ツールボックス」の「copy」ツールの「直線移動」で2個目を正面図か側面図で、下にドラッグして複製します。
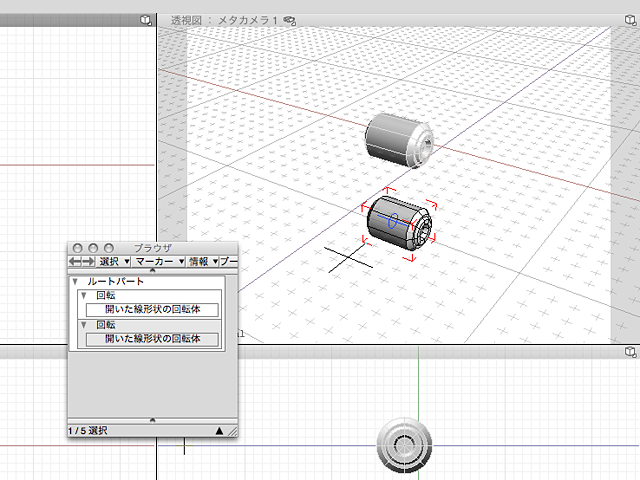 |
| 回転ジョイントを選択し、コピーの直線移動で複製します。 |
ブラウザ中で上の「回転」の中に下の「回転」を入れてみてください(その逆でもOKです)。
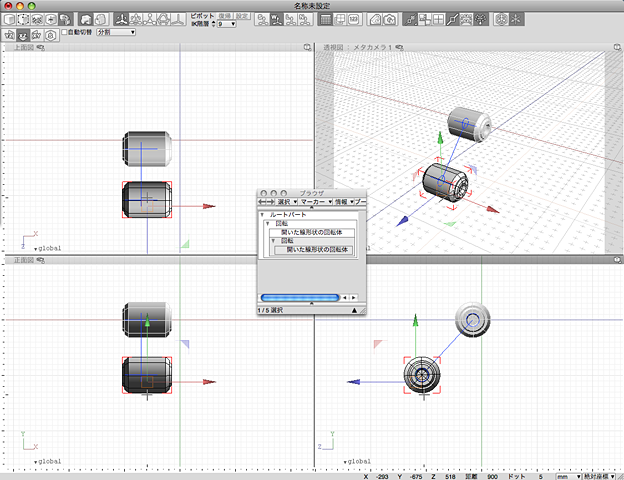
「ツールバー」の「インバースキネマティクス操作モード」をクリックすると、ジョイントとジョイントを繋いだ「ボーンリンク」と呼ばれる青い線が表示されます。先端部分の「マニピュレータ」を使って動かすと、階層構造を親子関係とした関節として動かすことができます。ここでの動作は、形状の配置とは別に動作のテスト用ですので、操作し終わったらジョイントを元の状態にリセットできますので、安心して動かしてみてください。ブラウザで「回転」を選択した状態で「形状の情報」を表示すると、その回転に応じたスライダーが表示されていますので、スライダーを使った動作のコントロールもできます。ブラウザ上でマウスの右クリックで出て来るメニューで全てのジョイントをリセットを選択すると、初期状態に戻ります。ブーリアン形状をシリンダー形状と同じ位置に書き込んだり、回転ジョイントを中心にうまく入力するためにも、形状が斜めになっていない状態で作成する方が簡単です。ジョイントのリセットは頻繁に使うので憶えておきましょう。
 |
| ブラウザで「回転」をもうひとつの「回転」の下に配置します。これで、関節に親子関係ができました。 「ツールバー」の「インバースキネマティクス操作モード」をクリックすると、作成したボーンリンクを試せます |
 |
| 内側の回転ジョイントのパートを選んだ状態で、マニピュレータを使って、動作を試してみてください |
 |
| 「ブラウザ」の「回転」を選択して、「形状情報」ウインドウを表示すると、スライダーで回転動作を試してみることもできます。またスライダの上の▼のタブで動作範囲を制限することも可能です。 |
●ジョイントが装着される凹みを作る
次に、腕や足などパーツにジョイントが装着される場所に、へこみを作ります。これは先に説明したとおり、「ブーリアンレンダリング」という手法を使います。装着される脚などの形状を貫通するように、先ほど制作した回転ジョイントより一回り大きな円柱形状を円の掃引体でもコの字形の回転体でもよいので作成し、「ブラウザ」でその形状をダブルクリックして、名前の先頭に「*」を付けます。これは、「*」がついた形状の内側にあるものはすべて削られるという、特殊記号です。
以下の説明図はジョイントを動かした状態で撮っていますが、直立状態で形状を作ってください。その方が簡単です。
 |
| 腕や足のパーツに、ジョイントを装着するための凹みを作ります(4番目の図の再掲です) |
ジョイントと同じ位置に、ひとまわり大きな円柱を作成し、ブラウザで名前の前に半角で「*」を挿入します
 |
| 試しにレンダリングしてみたところ。「Ctrl+Shift+R」でレンダリングできます。画像では着色していますが、まだ色をつけていませんので実際に表示されるのはグレー一色です |
なお、Shadeの特殊記号は全て英文半角で打たなければなりません。全角文字では機能しませんので注意してください。その「*」が付いた円柱の内側にある形状は全て削られてしますが、先に作った関節のシリンダー形状は削られてしまっては困ります。そこで、「ブラウザ」で名前の前には「!」を付与しておけば、円柱に削られずに表示されるようになります。なお、今回は円柱形状を使用していますが、この凹み用の切り欠きは、もちろん円柱以外のどんな形をしていても大丈夫です。肘のプロテクタにも同じように「!」記号を念のために入れて強制表示するようにおきました。
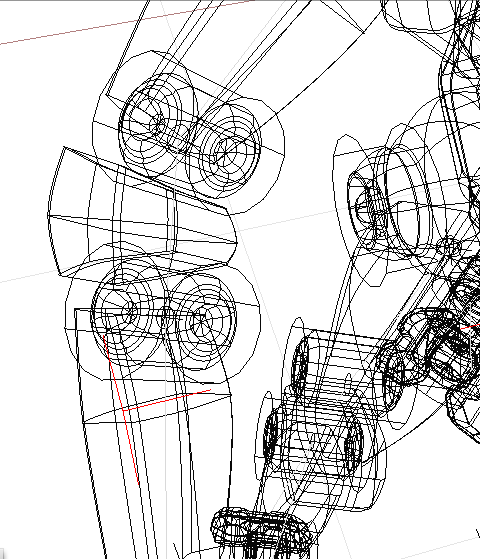 |
| 関節部のワイヤーフレーム表示。ジョイントの外側にもう1つ円柱が見える |
 |
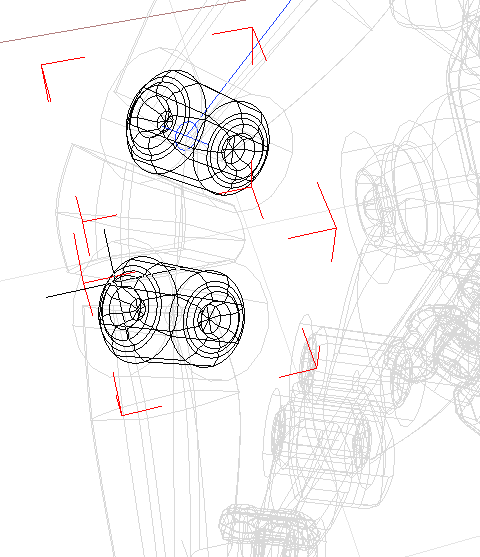
| 「ブラウザ」で円柱の名前の前に「*」を付けることで、ほかのパーツをくりぬける |
 |
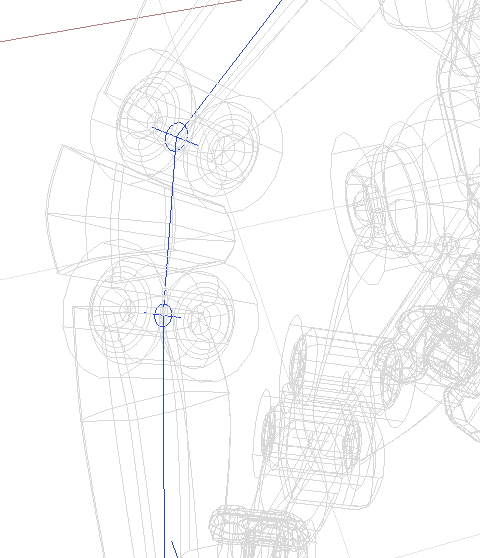
| ジョイントも同じ位置に配置しますが、これはくりぬかれないように強制表示する「!」を名前の前につけておきます |
 |
| 関節にジョイントを組み込んだ状態。関節がどこで曲がるようになっているかがわかります |
先にも述べたように、Shadeでは、ジョイントの位置は図形ウインドウに形状とは無関係に描き込んで行くことができます。また、ジョイントの主従関係も「ブラウザ」で自由に組み替えることができます。ジョイントの中には、形状や別のジョイントも入れることができますので、親から子へと主従関係をつけながら、階層を深くして末端を動かせます。
身体の各部に動きに応じたジョイント(ボールジョイントや回転ジョイント)を配置し、上半身へは、ボディの腰→腹部→胸部→上腕→前腕、といったようにリンクを階層構造にして組み立てていきます。胸からは、右腕、左腕、首と3つに分岐させます。同様に下半身は腰→大腿部→下腿部→足と左足と右足に分けて、階層構造にしていきます。
腹部には「part」「ボールジョイント」を使い、どの方向にも曲がるように多くのジョイントを割り当てています。肘などは回転しかしないように回転ジョイントを使っていますが、そのかわりに二重関節にして、関節の可動域を拡げています。最初に掲載した分解図を元に、各部品を配置してジョイントを組んでみましょう。今回、Shadeでモデリングしたファイルを添付しておきますので、わからない所は中がどうなっているか覗いてみてください。
■ポーズを付ける
できあがったら、身体の各部を選択して、「インバースキネマティクス操作モード」で操作を作ってみましょう。「形状の情報」で、スライダーを使って動かすこともできます。インバースキネマティクスモードの時にはマニピュレータを使うと形状がねじれずに動かすことができます。細部の調整には形状情報のジョイント値をいじった方が微調整が効きます。ジョイントのリセットもできますので、好きに動かしてみましょう。
最後に、ここまで作ってきたロボットのデータをご用意しました。こちらを「Shade」でロードしていただければロボットを見ることができます。次回以降はこちらのデータを使って、よりロボットらしく引き立てる方法を学んでいきます。
ロボットデータ ダウンロード(3.6MB)