会場は立ち見のお客さんも出るほどの大盛況。講演後には実世界ハプティクスを体験したい人で長蛇の列ができていました。
写真やビデオカメラによって視覚を、マイクやスピーカーによって聴覚を、離れた場所にいる相手に通信することは現代では当たり前のように実現しています。
しかし、今まで五感のうち視覚、聴覚に次いで大切な触覚を伝えることはできませんでした。
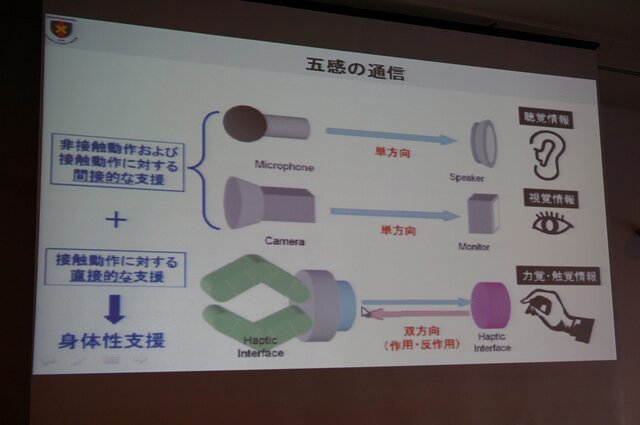 |
| 五感の通信をどのように行うか? |
そんな中で、離れた場所の触覚を鮮明に通信することを実現したのが実世界ハプティクスです。
5感の通信のうち、聴覚(音)や視覚(画像)は一方通行の通信でした。しかし、触覚は双方向の通信です。例えば、膨らんだ風船を触ったとき、こちらが押せば押すほど風船が押し返してくる力も強くなります。力を集める装置(スレーブ)に力を加えたときに、手元で力を再現する装置(マスター)側から押し返す力が働き、作用反作用の法則が成り立たなければ、触覚を再現することはできません。
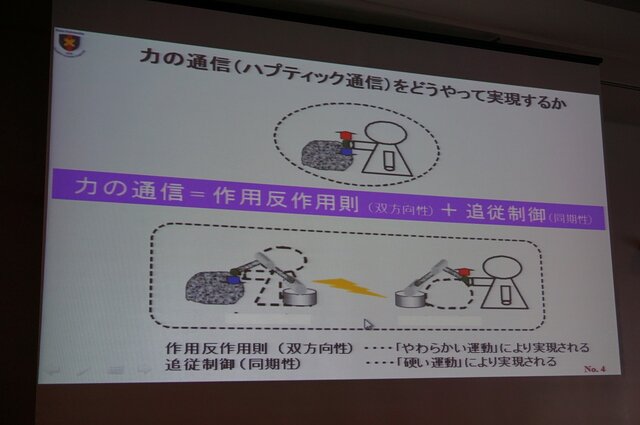 |
| 力の通信を行う手法 |
力触覚情報を伝達する研究は20世紀半ばのアメリカからはじまりました。米国アルゴンヌ国立研究所のレイモンド・ゲルツ博士は、力の通信には「バイラテラル制御(双方向性と同期性)」が大事であるという結論を出しています。
双方向性とは、作用反作用の法則のことで、極めて「やわらかい運動」によって実現されます。産業用ロボットが家庭の中に入っていかないのは「やわらかい運動」が欠けていることが原因です。
同期性とは追従制御のことで「硬い運動」によって実現されます。先端医療ロボット「ダ・ヴィンチ」は、この「硬い運動」のみでできており「やわらかい運動」はできません。
この「やわらかい運動」と「硬い運動」を同居させることができる唯一の方式が「ABC方式」です。マスターとスレーブの加速度の差をゼロにすると「硬い運動」が生まれ、和をゼロにすると「やわらかい運動」が生まれます。これによって性能や安定性を上げることができます。
力が通信できれば必ずロボットはやわらかくなり、反対にやわらかいロボットは必ず力の通信ができます。これを「ソフトロボティクス」と呼びます。ソフトロボティクスによってやわらかく器用で人間らしい動作が実現でき、この性能はそれを解決する根本的な技術(コアテクノロジー)です。
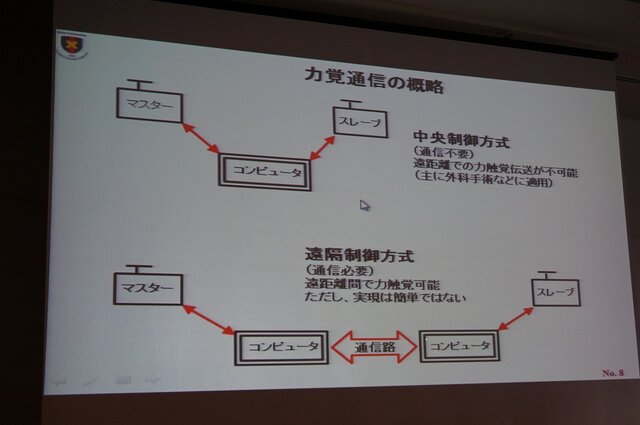 |
| 力覚通信の概要 |
つまり、ソフトロボティクスは未来社会で求められている技術であり、通信によって遠隔操作で離れたものを触ることができることは非常に大きな可能性を持っているということなのです。
ここで、参加者のみなさんに遠隔操作で触覚を感じる体験をしてもらう公開実験を実施。会場から挙手で希望者を募ります。
 |
| 制作された装置 |
写真右側の装置にスポンジをはさんで、左側の装置を押してみると・・・まさにそこにあるスポンジを押しているかのような感覚が手に伝わります。
今度は右側の装置にマジックテープをセットしてみます。すると、ないはずのマジックテープをビリビリとはがしている感覚が伝わり、体験した人たちは「おおおはがれました!」「すごいです!たのしいです!」と世界で唯一の装置に、大興奮で感動の声を上げていました。
右側の装置を自分の手で押せば、綱引きのように力の押し合いを感じることもできます。
押す側のリニアモーターが離れたほうの力覚を再現しているため、モーターを切れば感覚がなくなり、どれだけ力を加えれば風船が割れるかがわからなくなります。
VRゲームにこの技術を応用する場合、弱い敵キャラは手触りを柔らかくしたりなど、敵の強さが触覚で感じられるような新しい表現が可能になり、没入感の上を行く感覚を体感することができます。
また、実世界ハプティクスの技術はすべて国内で生み出された技術。今後、日本を発展させるユニークな原動力となるでしょう。
力の出力倍率を調整することで、繊細な動きのまま重いものを動かすことができたり、普通の力で触れたのではつぶれてしまうミジンコのような微生物に触って動きを感じることもできます。双方向の温度の再現もでき、例えば離れた場所にいながら赤ちゃんを抱いて体温をかんじることも可能です。
手術への応用では、これまで再現が難しかった手のひらを返すような動きも可能に。より複雑な動きにも対応できます。触っている感覚も伝わってくるので、これまでより格段に操作がしやすい先端医療ロボットとしての活用が期待されます。
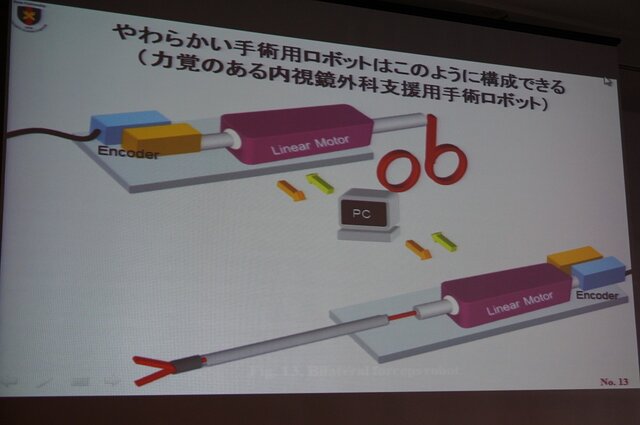 |
| 医療での応用も期待される |
基礎研究はもう終わっていて、現在は開発段階とのこと。産業用としてはすでに実現化もされています。医療の場で使用されるほど精密なハプティック通信ができる技術。今後は簡単に使える開発ツールやアプリなどのプラットフォームの提供を行っていく予定です。
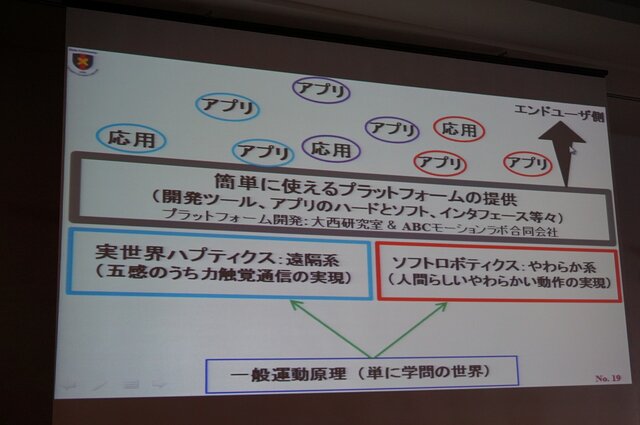 |
| 開発するためのプラットフォームを整えていく |